Markov Chain Monte Carlo#
Setup#
We’ll use some utilities from Pyro, a probabilistic programming language that wraps PyTorch. Pyro requires PyTorch 1.11 so this pip install command will take a little time.
!pip install -q pyro-ppl
Bayesian inference with MCMC in the hierarchical Gaussian model#
Let’s return to the “8 Schools” example from Lecture 3. To recap: we have test scores from \(S\) schools. Let \(N_s\) denote the number of students from school \(s\) and \(x_{s,n} \in \mathbb{R}\) denote the score of the \(n\)-th student from the \(s\)-th school.
We model the collection of scores using a hierarchical model. Unlike last time, now we will add a prior on the per-school variance as well.
Each school has its own mean \(\theta_s\) and variance \(\sigma_s^2\). The means are linked via a hierarchical prior: they are conditionally independent given the global mean \(\mu\) and variance \(\tau^2\)
We will use MCMC to draw approximate samples from the posterior distribution \(p(\tau^2, \mu, \{\theta_s, \sigma_s^2\}_{s=1}^S \mid \{\{x_{s,n}\}_{n=1}^{N_s}\}_{s=1}^S, \eta)\).
# Setup
import torch
from torch.distributions import Normal, Gamma, Categorical, \
TransformedDistribution
from torch.distributions.transforms import PowerTransform
from pyro.ops.stats import effective_sample_size, autocorrelation
from fastprogress import progress_bar
import matplotlib.pyplot as plt
from matplotlib.cm import Blues
import seaborn as sns
sns.set_context("notebook")
class ScaledInvChiSq(TransformedDistribution):
"""
Implementation of the scaled inverse \chi^2 distribution defined in class.
We will implement it as a transformation of a gamma distribution.
"""
def __init__(self, dof, scale):
base = Gamma(dof / 2, dof * scale / 2)
transforms = [PowerTransform(-1)]
TransformedDistribution.__init__(self, base, transforms)
self.dof = dof
self.scale = scale
Sample synthetic data#
We will modify the data from the 8 shcools example of Gelman et al (2013). Specifically, we’ll sample 20 scores so that they have the same mean and the specified standard deviation.
Remember that \(\bar{\sigma}_s = \sigma_s / \sqrt{N_s}\) in our notation from Lecture 3.
# Hyper parameters
S = 8 # number of schools
N_s = torch.tensor(20) # number of students per school
mu_0 = 0.0 # prior mean of the global effect
kappa_0 = 0.1 # prior concentration in the NIX prior
nu_0 = 0.1 # degrees of freedom for the prior on \tau^2
tausq_0 = 100.0 # prior mean of the variance \tau^2
alpha_0 = 0.1 # degrees of freedom for the prior on \sigma_s^2
sigmasq_0 = 10.0 # scale of the prior on \sigma_s^2
# Sample data
torch.manual_seed(305)
x_bars = torch.tensor([28., 8., -3., 7., -1., 1., 18., 12.])
sigma_bars = torch.tensor([15., 10., 16., 11., 9., 11., 10., 18.])
xs = Normal(x_bars, torch.sqrt(N_s) * sigma_bars).sample((N_s,))
# z-score the samples
zs = (xs - xs.mean(axis=0)) / xs.std(axis=0)
# Rescale so they have the desired variance
xs = x_bars + torch.sqrt(N_s) * sigma_bars * zs
# Note: xs.shape == (N_s, S)
assert torch.allclose(xs.mean(axis=0), x_bars)
assert torch.allclose(xs.std(axis=0), torch.sqrt(N_s) * sigma_bars)
Gibbs Sampling#
We will use Gibbs sampling to draw approximate samples from the posterior distribution. The idea is to cycle between each latent variable and sample from its conditional distribution given the current settings of the remaining variables. In models like this one, the conditional distributions often have simple closed forms. We will derive and implement the updates one at a time.
Calculate the log joint probability#
First, we will write a function to compute the log joint probability. This will be useful for tracking the Gibbs sampler’s progress over iterations.
def log_probability(tausq, mu, thetas, sigmasqs, xs,
tausq_0, nu_0, mu_0, kappa_0, alpha_0, sigmasq_0):
"""
Compute the log joint probability of the model parameters and data given the
hyperparameters of the model.
Args:
tausq: a scalar \tau^2 value
mu: a scalar mu value
thetas: a shape (S,) tensor of \theta values
sigmasqs: a shape (S,) tensor of \sigma_s^2 values
xs: a shape (S, N_s) tensor of data points
tausq_0: scale of prior on \tau^2
nu_0: degrees of freedom of prior on \tau^2
mu_0: mean of prior on \mu
kappa_0: precision of prior on \mu
alpha_0: degrees of freedom of prior on \sigma_s^2
sigmasq_0: scale of prior on \sigma_s^2
Returns:
Log joint probability.
"""
lp = ScaledInvChiSq(nu_0, tausq_0).log_prob(tausq)
lp += Normal(mu_0, torch.sqrt(tausq / kappa_0)).log_prob(mu)
lp += Normal(mu, torch.sqrt(tausq)).log_prob(thetas).sum()
lp += ScaledInvChiSq(alpha_0, sigmasq_0).log_prob(sigmasqs).sum()
lp += Normal(thetas, torch.sqrt(sigmasqs)).log_prob(xs).sum()
return lp
Gibbs update for \(\theta_s\)#
We have
where
I.e. the conditional means are precision-weighted averages of the prior and sample means.
Note: all of the \(\theta_s\) parameters are conditionally independent given the remaining variables. That means we can sample them all in parallel using a blocked Gibbs update.
def gibbs_sample_thetas(tausq, mu, sigmasqs, xs):
"""
Sample the conditional distribution of \theta_s given all the other
variables. Since the \theta_s parameters are conditionally independent given
everything else, we can sample them in parallel as a blocked Gibbs step.
Args:
tausq: a scalar \tau^2 value
mu: a scala mu value
sigmasqs: a shape (S,) tensor of \sigma_s^2 values
xs: a shape (S, N_s) tensor of data points
Returns:
A shape (S,) tensor of \theta_s values drawn from their complete conditional
"""
N_s = xs.shape[0]
v_theta = 1 / ((N_s / sigmasqs) + (1 / tausq))
theta_hat = v_theta * ((xs.sum(axis=0) / sigmasqs) + mu / tausq)
thetas = Normal(theta_hat, torch.sqrt(v_theta)).sample()
return thetas
Gibbs update for \(\sigma_s^2\)#
The conditional distribution of \(\sigma_s^2\) given all the other variables is,
where
Note: Recall Lecture 1 on a normal model with unknown variance. Same thing here.
def gibbs_sample_sigmasq(alpha_0, sigmasq_0, thetas, xs):
"""
Sample the conditional distribution of \sigma_s^2 given all the other
variables. Since the \sigma_s^2 parameters are conditionally independent
given everything else, we can sample them in parallel as a blocked Gibbs
step.
Args:
alpha_0: degrees of freedom of prior on \sigma_s^2
sigmasq_0: scale of prior on \sigma_s^2
thetas: a shape (S,) tensor of \theta_s values
xs: a shape (S, N_s) tensor of data points
Returns:
A shape (S,) tensor of \sigma_s^2 values drawn from their complete
conditional distribution.
"""
N_s = xs.shape[0]
alpha_N = alpha_0 + N_s
sigmasq_N = 1 / alpha_N * (alpha_0 * sigmasq_0
+ torch.sum((xs - thetas)**2, axis=0))
return ScaledInvChiSq(alpha_N, sigmasq_N).sample()
Gibbs update for \(\mu\)#
The conditional distribution of \(\mu\) given everything else is,
where
def gibbs_sample_mu(mu_0, kappa_0, tausq, thetas):
"""
Sample the conditional distribution of \mu given all the other
variables.
Args:
mu_0: mean of prior on \mu
kappa_0: precision of prior on \mu
tausq: sample of the global variance, \tau^2
thetas: a shape (S,) tensor of \theta_s values
Returns:
Scalar sample of \mu from its complete conditional distribution.
"""
S = len(thetas)
v_mu = tausq / (kappa_0 + S)
mu_hat = (mu_0 * kappa_0 + thetas.sum()) / (kappa_0 + S)
return Normal(mu_hat, torch.sqrt(v_mu)).sample()
Gibbs update for \(\tau^2\)#
The conditional distribution of \(\tau^2\) given everything else is,
where
def gibbs_sample_tausq(nu_0, tausq_0, mu_0, kappa_0, mu, thetas):
"""
Sample the conditional distribution of \mu given all the other
variables.
Args:
nu_0: degrees of freedom of prior on \tau^2
tausq_0: scale of prior on \tau^2
mu_0: mean of prior on \mu
kappa_0: precision of prior on \mu
mu: sample of the global mean, \mu
thetas: a shape (S,) tensor of \theta_s values
Returns:
Scalar sample of \tau^2 from its complete conditional distribution.
"""
S = len(thetas)
nu_N = nu_0 + S + 1
tausq_N = 1/nu_N * (nu_0 * tausq_0 + kappa_0 * (mu - mu_0)**2
+ torch.sum((thetas - mu)**2))
return ScaledInvChiSq(nu_N, tausq_N).sample()
Put it all together#
That’s all the updates! All that is left is a simple function to cycle through these updates one at a time. After each iteration, we will compute and save the log joint probability.
def gibbs(xs, tausq_0, nu_0, mu_0, kappa_0, alpha_0, sigmasq_0, N_samples=1000):
"""
Run the Gibbs sampler.
Args:
xs: a shape (S, N_s) tensor of data points
tausq_0: scale of prior on \tau^2
nu_0: degrees of freedom of prior on \tau^2
mu_0: mean of prior on \mu
kappa_0: precision of prior on \mu
alpha_0: degrees of freedom of prior on \sigma_s^2
sigmasq_0: scale of prior on \sigma_s^2
N_samples: number of Gibbs iterations to run
Returns:
Dictionary with samples of the parameters tausq, mu, thetas, sigmasqs, and
the log joint probability at each iteration.
"""
N_s, S = xs.shape
# Initialize the Gibbs sampler with a draw from the prior
tausq = ScaledInvChiSq(nu_0, tausq_0).sample()
mu = Normal(mu_0, torch.sqrt(tausq / kappa_0)).sample()
thetas = Normal(mu, torch.sqrt(tausq)).sample((S,))
sigmasqs = ScaledInvChiSq(alpha_0, sigmasq_0).sample((S,))
# Compute the initial log probability
lp = log_probability(tausq, mu, thetas, sigmasqs, xs,
tausq_0, nu_0, mu_0, kappa_0, alpha_0, sigmasq_0)
# Initialize the output
samples = [(tausq, mu, thetas, sigmasqs, lp)]
# Run the Gibbs sampler
for itr in progress_bar(range(N_samples - 1)):
# Cycle through each update
tausq = gibbs_sample_tausq(nu_0, tausq_0, mu_0, kappa_0, mu, thetas)
mu = gibbs_sample_mu(mu_0, kappa_0, tausq, thetas)
thetas = gibbs_sample_thetas(tausq, mu, sigmasqs, xs)
sigmasqs = gibbs_sample_sigmasq(alpha_0, sigmasq_0, thetas, xs)
# Compute the log probability
lp = log_probability(tausq, mu, thetas, sigmasqs, xs,
tausq_0, nu_0, mu_0, kappa_0, alpha_0, sigmasq_0)
# Update the sample list
samples.append((tausq, mu, thetas, sigmasqs, lp))
# Combine the output into a dictionary with a cool python zip trick
samples_dict = dict()
keys = ["tausq", "mu", "thetas", "sigmasqs", "lps"]
values = zip(*samples)
for key, value in zip(keys, values):
samples_dict[key] = torch.stack(value)
return samples_dict
N_samples = 10000
samples = gibbs(xs, tausq_0, nu_0, mu_0, kappa_0, alpha_0, sigmasq_0, N_samples)
Plot summaries of the MCMC samples#
First, let’s look at a trace of the log joint probability over iterations
plt.plot(torch.arange(N_samples), samples["lps"])
plt.xlabel("Iteration")
plt.ylabel("Log Joint Probability")
plt.tight_layout()
# plt.savefig("lps1.pdf")
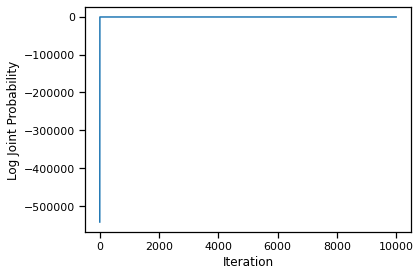
We see that the first few iterations are simply burning in the chain. We will discard these iterations in our subsequent analyses.
burnin = 100
plt.plot(torch.arange(burnin, N_samples), samples["lps"][burnin:])
plt.xlabel("Iteration")
plt.ylabel("Log Joint Probability")
plt.tight_layout()
# plt.savefig("lps2.pdf")
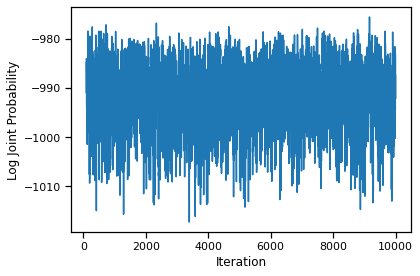
The trace from iteration 100 onward looks much more stable.
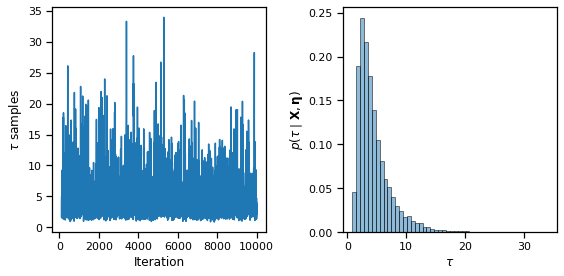
fig, axs = plt.subplots(1, 2, figsize=(8, 4))
axs[0].plot(torch.arange(burnin, N_samples),
torch.sqrt(samples["tausq"][burnin:]))
axs[0].set_xlabel("Iteration")
axs[0].set_ylabel(r"$\tau$ samples")
axs[1].hist(torch.sqrt(samples["tausq"][burnin:]), 50,
alpha=0.5, ec='k', density=True)
axs[1].set_xlabel(r"$\tau$")
axs[1].set_ylabel(r"$p(\tau \mid \mathbf{X}, \mathbf{\eta})$")
plt.tight_layout()
# plt.savefig("tau_samples.pdf")
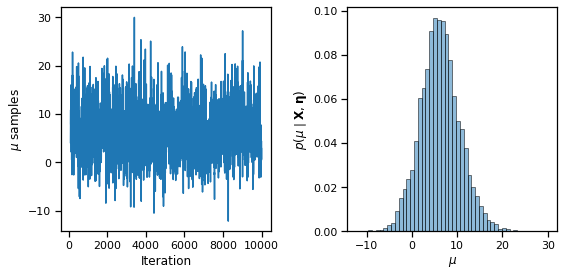
fig, axs = plt.subplots(1, 2, figsize=(8, 4))
axs[0].plot(torch.arange(burnin, N_samples), samples["mu"][burnin:])
axs[0].set_xlabel("Iteration")
axs[0].set_ylabel(r"$\mu$ samples")
axs[1].hist(samples["mu"][burnin:], 50, alpha=0.5, ec='k', density=True)
axs[1].set_xlabel(r"$\mu$")
axs[1].set_ylabel(r"$p(\mu \mid \mathbf{X}, \mathbf{\eta})$")
plt.tight_layout()
# plt.savefig("mu_samples.pdf")
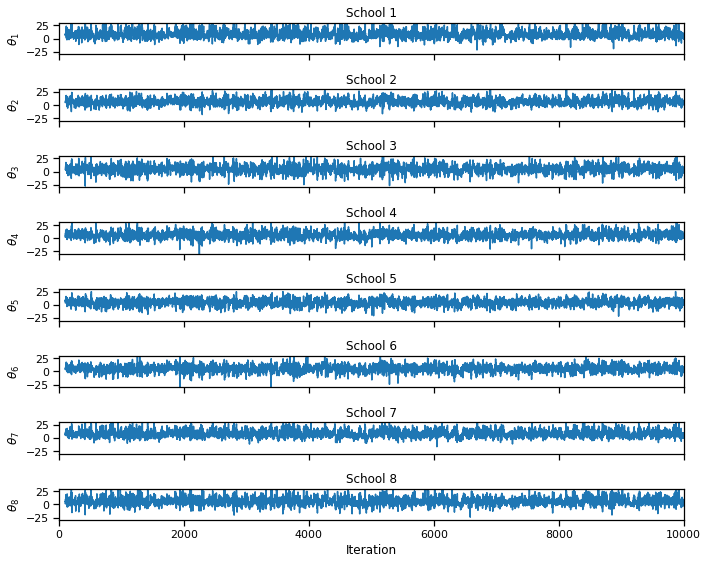
fig, axs = plt.subplots(S, 1, figsize=(10, 8), sharex=True)
for s in range(S):
axs[s].plot(torch.arange(burnin, N_samples), samples["thetas"][burnin:, s])
if s == S-1: axs[s].set_xlabel("Iteration")
axs[s].set_ylabel(r"$\theta_{}$".format(s+1))
axs[s].set_title("School {}".format(s+1))
axs[s].set_xlim(0, N_samples)
axs[s].set_ylim(-30, 30)
plt.tight_layout()
# plt.savefig("theta_samples1.pdf")
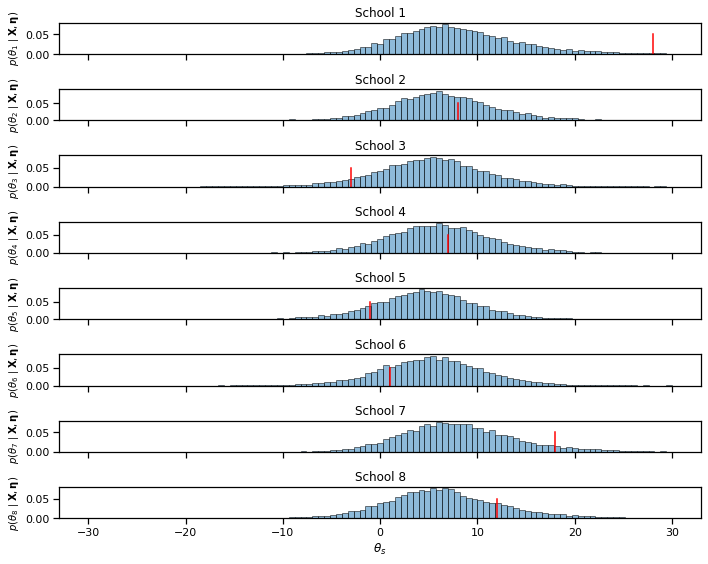
bins = torch.linspace(-30, 30, 100)
fig, axs = plt.subplots(S, 1, figsize=(10, 8), sharex=True)
for s in range(S):
axs[s].hist(samples["thetas"][:, s], bins, edgecolor='k',
alpha=0.5, density=True)
# axs[s].plot([x_bars[s], x_bars[s]], [0, 0.05], '-r')
axs[s].plot(torch.mean(xs[:, s]) * torch.ones(2), [0, 0.05], '-r')
if s == S-1: axs[s].set_xlabel(r"$\theta_s$")
axs[s].set_ylabel(r"$p(\theta_" + str(s+1) \
+ r" \mid \mathbf{X}, \mathbf{\eta})$",
fontsize=10)
axs[s].set_title("School {}".format(s+1))
plt.tight_layout()
# plt.savefig("theta_samples2.pdf")
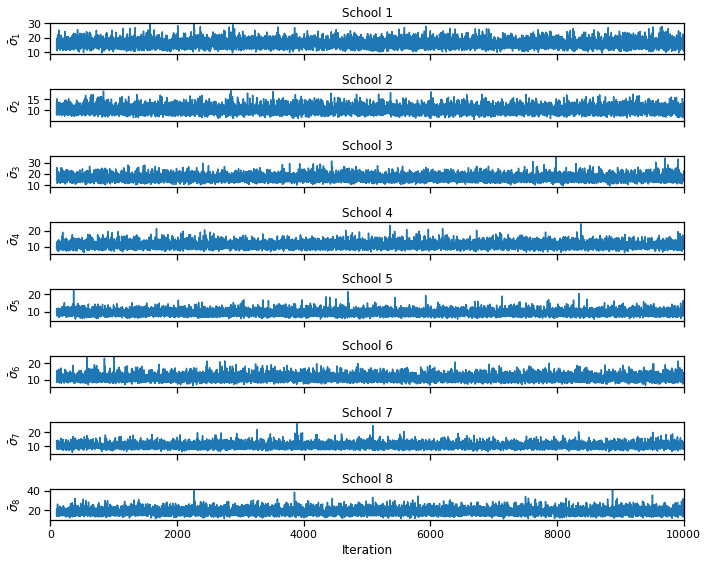
fig, axs = plt.subplots(S, 1, figsize=(10, 8), sharex=True)
for s in range(S):
axs[s].plot(torch.arange(burnin, N_samples),
torch.sqrt(samples["sigmasqs"] / N_s)[burnin:, s])
if s == S-1: axs[s].set_xlabel("Iteration")
axs[s].set_ylabel(r"$\bar{{\sigma}}_{}$".format(s+1))
axs[s].set_title("School {}".format(s+1))
axs[s].set_xlim(0, N_samples)
# axs[s].set_ylim(-30, 30)
plt.tight_layout()
# plt.savefig("sigma_samples1.pdf")
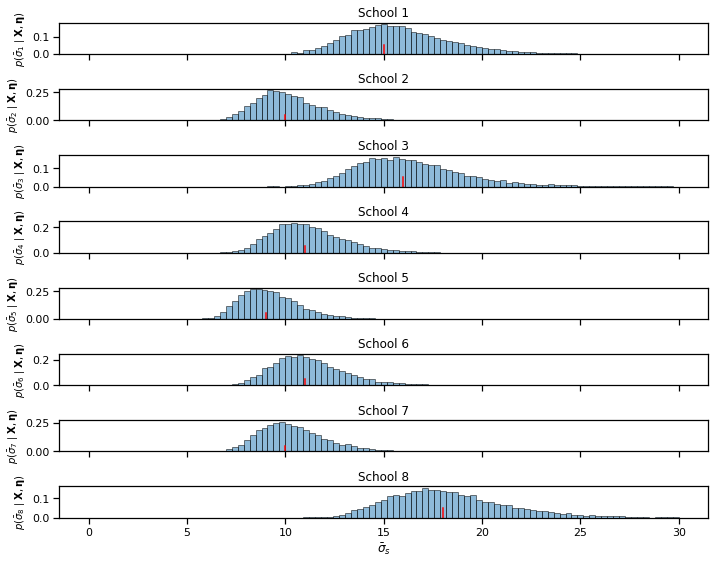
bins = torch.linspace(0, 30, 100)
fig, axs = plt.subplots(S, 1, figsize=(10, 8), sharex=True)
for s in range(S):
axs[s].hist(torch.sqrt(samples["sigmasqs"] / N_s)[:, s], bins,
edgecolor='k', alpha=0.5, density=True)
# axs[s].plot([x_bars[s], x_bars[s]], [0, 0.05], '-r')
axs[s].plot(sigma_bars[s] * torch.ones(2), [0, 0.05], '-r')
if s == S-1: axs[s].set_xlabel(r"$\bar{\sigma}_s$")
axs[s].set_ylabel(r"$p(\bar{\sigma}_" + str(s+1) + \
r" \mid \mathbf{X}, \mathbf{\eta})$",
fontsize=10)
axs[s].set_title("School {}".format(s+1))
plt.tight_layout()
# plt.savefig("sigma_samples2.pdf")
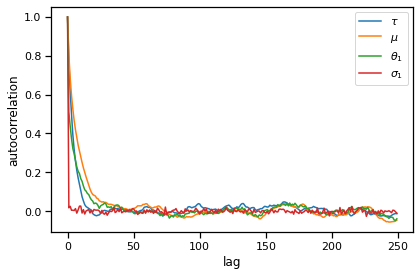
MCMC Diagnostics#
acf_tausq = autocorrelation(torch.sqrt(samples["tausq"][burnin:]))
acf_mu = autocorrelation(samples["mu"][burnin:])
acf_theta1 = autocorrelation(samples["thetas"][burnin:, 0])
acf_sigma1 = autocorrelation(torch.sqrt(samples["sigmasqs"])[burnin:, 0])
plt.plot(acf_tausq[:250], label=r"$\tau$")
plt.plot(acf_mu[:250], label=r"$\mu$")
plt.plot(acf_theta1[:250], label=r"$\theta_1$")
plt.plot(acf_sigma1[:250], label=r"$\sigma_1$")
plt.legend()
plt.xlabel("lag")
plt.ylabel("autocorrelation")
plt.tight_layout()
# plt.savefig("acf.pdf")
print("Effective sample sizes:")
print("tausq: ", effective_sample_size(samples["tausq"][None, burnin:]))
print("mu: ", effective_sample_size(samples["mu"][None, burnin:]))
print("theta1: ", effective_sample_size(samples["thetas"][None, burnin:, 0]))
print("sigamsq1: ", effective_sample_size(samples["sigmasqs"][None, burnin:, 0]))
Effective sample sizes:
tausq: tensor(1563.3730)
mu: tensor(625.2454)
theta1: tensor(1027.9814)
sigamsq1: tensor(8996.0498)
Recap#
This notebook implemented a Gibbs sampler for the hierarchical Gaussian model from Lecture 3. We showed:
How to derive the complte conditional distributions for each variable and sample from them.
A blocked Gibbs update for the per-school means and variances, since those parameters are conditionally independent given the rest.
Monitoring the algorithm’s performance by plotting the log joint probability over iterations.
Visualizing of the posterior marginal probabilities for each variable by simply taking a histogram of samples (after discarding a few burnin samples).
MCMC diagnostics like the autocorrelation function and the effective sample size.